2.3.6.1.1. Blink
2.3.6.1.1.1. Description
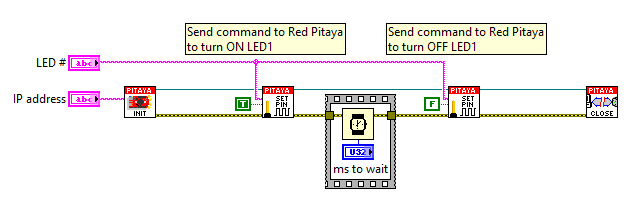
This example shows how to control one of the Red Pitaya on-board LEDs and make it blink.
2.3.6.1.1.3. SCPI Code Examples
2.3.6.1.1.3.1. Code - MATLAB ®
The code is written in MATLAB. In the code, we use SCPI commands and TCP client communication. Copy the code from below into the MATLAB editor, save the project, and hit the “Run” button.
%% Define Red Pitaya as TCP/IP object
IP = '192.168.178.56'; % Input IP of your Red Pitaya...
port = 5000;
RP = tcpclient(IP, port); % Define Red Pitaya as an TCP client object
%% Open connection with your Red Pitaya
RP.ByteOrder = "big-endian";
configureTerminator(RP, 'CR/LF'); % defines the line terminator (end sequence of input characters)
%% Send SCPI command to Red Pitaya to turn ON LED1
writeline(RP,'DIG:PIN LED1,1');
pause(5); % Set time of LED ON
%% Send SCPI command to Red Pitaya to turn OFF LED1
writeline(RP,'DIG:PIN LED1,0');
%% Close connection with Red Pitaya
clear RP;
2.3.6.1.1.3.2. Code - Python
#!/usr/bin/env python3
import sys
import time
import redpitaya_scpi as scpi
IP = 'rp-f066c8.local'
rp_s = scpi.scpi(IP)
if (len(sys.argv) > 2):
led = int(sys.argv[2])
else:
led = 0
print ("Blinking LED["+str(led)+"]")
period = 1 # seconds
while 1:
time.sleep(period/2.0)
rp_s.tx_txt('DIG:PIN LED' + str(led) + ',' + str(1))
time.sleep(period/2.0)
rp_s.tx_txt('DIG:PIN LED' + str(led) + ',' + str(0))
rp_s.close()
2.3.6.1.1.3.3. Code - Scilab
clc
// Load SOCKET Toolbox. Steps 7&8
exec(SCI+'contribsocket_toolbox_2.0.1loader.sce');
SOCKET_init();
IP = '192.168.128.1';
port = 5000;
tcpipObj ='RedPitaya';
SOCKET_open(tcpipObj, IP, port);
SOCKET_write(tcpipObj, 'DIG:PIN LED1,1');
xpause(5*1E+6)
SOCKET_write(tcpipObj, 'DIG:PIN LED1,0');
SOCKET_close(tcpipObj);
2.3.6.1.1.4. API Code Examples
Note
The API code examples don’t require the use of the SCPI server. Instead, the code should be compiled and executed on the Red Pitaya itself (inside Linux OS). Instructions on how to compile the code and other useful information are here.
2.3.6.1.1.4.1. Code - C API
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include "rp.h"
int main (int argc, char **argv) {
int unsigned period = 1000000; // uS
int unsigned led;
// index of blinking LED can be provided as an argument
if (argc > 1) {
led = atoi(argv[1]);
// otherwise LED 0 will blink
} else {
led = 0;
}
printf("Blinking LED[%u]\n", led);
led += RP_LED0;
// Initialization of API
if (rp_Init() != RP_OK) {
fprintf(stderr, "Red Pitaya API init failed!\n");
return EXIT_FAILURE;
}
int unsigned retries = 1000;
while (retries--){
rp_DpinSetState(led, RP_HIGH);
usleep(period/2);
rp_DpinSetState(led, RP_LOW);
usleep(period/2);
}
// Releasing resources
rp_Release();
return EXIT_SUCCESS;
}
2.3.6.1.1.4.2. Code - Python API
#!/usr/bin/python3
import time
import rp
period = 1 # period in secodns
# Initialize the interface
rp.rp_Init()
#####! Choose one of two methods, comment the other !#####
#! METHOD 1: Interacting with Registers direclty
while 1:
time.sleep(period/2.0)
rp.rp_LEDSetState(0b00000001) # or 0b00000001
time.sleep(period/2.0)
rp.rp_LEDSetState(0b00000000) # or 0
#! METHOD 2: Using Macros
while 1:
time.sleep(period/2.0)
rp.rp_DpinSetState(rp.RP_LED0, rp.RP_HIGH)
time.sleep(period/2.0)
rp.rp_DpinSetState(rp.RP_LED0, rp.RP_LOW)
# Release resources
rp.rp_Release()