3.5.5. List of supported SCPI & API commands
Here is a list of all available SCPI, API, and JupyterLab commands. The commands are organized into tables by functionality. Each table row represents the same command in SCPI, Python API, C++ API, and JupyterLAB. The Jupyter commands are identical to Python API commands, so please refer to them. In the final two columns is a command description and ecosystem version in which the command first appeared.
At the beginning of each table are all command parameter options and available macros.
For API commands you can find a detailed description in these C++ header files:
Command list
How to find all available SCPI commands per OS version?
Use the SYSTem:Help? SCPI command, which lists all available SCPI commands.
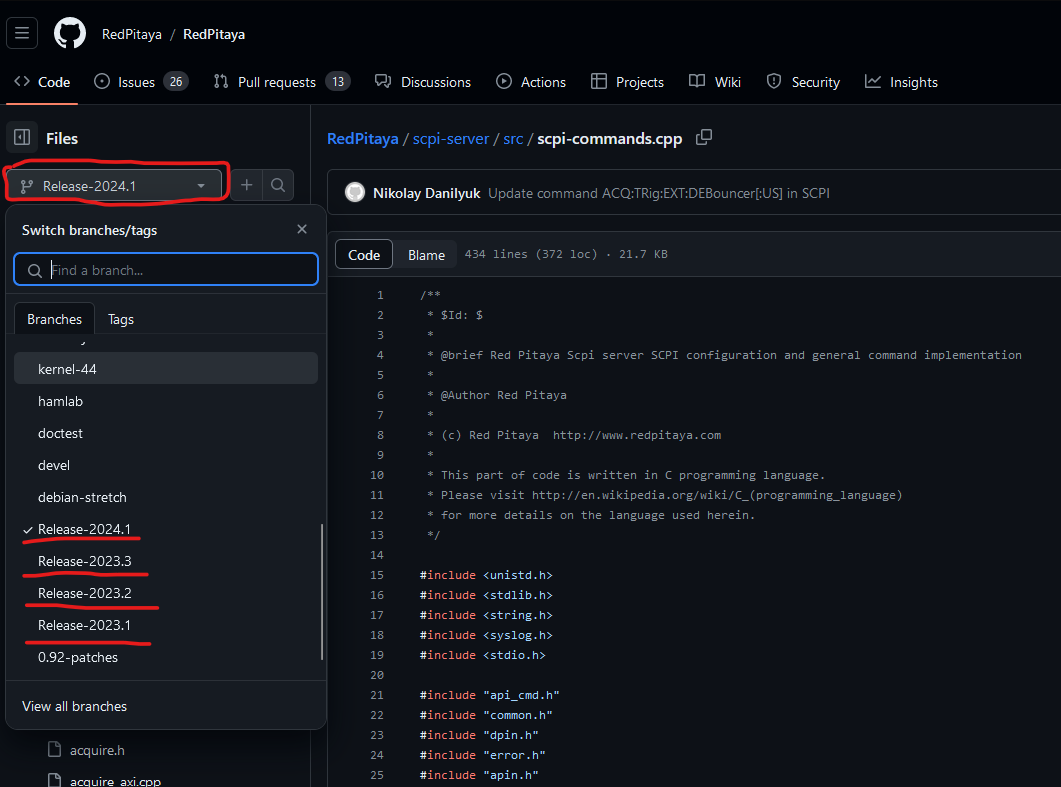
You can also find all SCPI commands that the board will accept depending on the Red Pitaya OS version here:
Latest Beta OS: Red Pitaya GitHub - scpi-server/src/scpi-commands.cpp.
For all other Red Pitaya OS versions, go to the link above and change the branch version to:
3.00-57 - Branch 2026.1 (file ends in .cpp).
2.07-48 - Branch 2025.2 (file ends in .cpp).
2.07-43 - Branch 2025.1 (file ends in .cpp).
2.05-37 - Branch 2024.3 (file ends in .cpp).
2.04-35 - Branch 2024.2 (file ends in .cpp).
2.00-30 - Branch 2024.1 (file ends in .cpp).
2.00-23 - Branch 2023.3 (file ends in .cpp).
2.00-18 - Branch 2023.2 (file ends in .c).
2.00-15 - Branch 2023.1 - Red Pitaya GitHub 2023.1- scpi-server/src/scpi-commands.c (file ends in .c).
1.04-28 - Branch 2022.2 (file ends in .c).
1.04-18 - Branch 2022.1 (file ends in .c).